Unambiguous, Real-Time and Accurate Map Matching for Multiple Sensing Sources
Mohamed Amine Falek , Cristel Pelsser , Antoine Gallais , Sebastien Julien and Fabrice Theoleyre
This 2018 international conference paper, by Mohamed Amine Falek and 4 coauthors, was presented at 2018 14th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob). Topics covered include global positioning system, roads, sensors, real-time systems, urban areas, probabilistic logic, atmospheric measurements, smart cities, unambiguous map matching, crowd sensing, gps traces, and merging heterogeneous datasets.
Full author list: Mohamed Amine Falek, Cristel Pelsser, Antoine Gallais, Sebastien Julien, and Fabrice Theoleyre.
Abstract
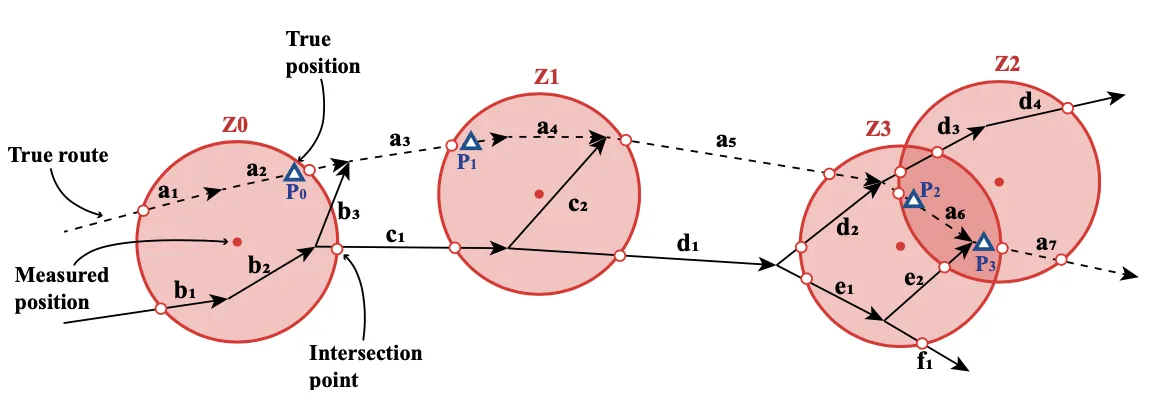
Smart Cities need real time information to improve the efficiency of their transportation systems. In particular, crowd sensing may help to identify the current speed in each street, the congested areas, etc. In this context, map matching techniques are required to map a sequence of GPS waypoints into a set of streets on a common map. Unfortunately, most map matching approaches are probabilistic. We propose rather an unambiguous algorithm, able to identify all the possible paths that match a given sequence of waypoints. We need an unambiguous identification for each waypoints set. For instance, the actual speed should be assigned to the correct set of streets, without error. To identify all the possible streets, we construct the set of candidates iteratively. We identify all the edge candidates around each waypoint, and reconstruct all the possible sub-routes that connect them. We then verify a set of constraints, to eliminate impossible routes. The road segments common to all computed routes form an unambiguous match. We evaluate the matching ratio of our technique on real city maps (London, Paris and Luxembourg). We also validate our approach with a real GPS trace in Seattle.
Publication Details
- Publication Type
- Conference Paper
- Publication Date
- October 2018
- Published In
- 2018 14th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob)
- Pages
- 1–8
- Publisher
- IEEE
- Location
- Limassol, Cyprus
- Digital Object Identifier (DOI)
- 10.1109/WiMOB.2018.8589103
- External Link
- http://icube-publis.unistra.fr/4-FPGJ18
Suggested citation
Mohamed Amine Falek, Cristel Pelsser, Antoine Gallais, Sebastien Julien, and Fabrice Theoleyre. 2018. Unambiguous, Real-Time and Accurate Map Matching for Multiple Sensing Sources. In 2018 14th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob). IEEE, Limassol, Cyprus, 1–8. https://doi.org/10.1109/WiMOB.2018.8589103
BibTeX Citation
BibTeX Citation
@inproceedings{Falek2018,
title = {Unambiguous, Real-Time and Accurate Map Matching for Multiple Sensing Sources},
author = {Mohamed Amine Falek and Cristel Pelsser and Antoine Gallais and Sebastien Julien and Fabrice Theoleyre},
year = 2018,
month = oct,
journal = {2018 14th International Conference on Wireless and Mobile Computing, Networking and Communications ({WiMob})},
booktitle = {14th International Conference on Wireless and Mobile Computing, Networking and Communications, {WiMob} 2018},
publisher = {IEEE},
address = {Limassol, Cyprus},
pages = {1--8},
doi = {10.1109/WiMOB.2018.8589103},
isbn = {978-1-5386-6877-1},
issn = {2160-4886},
url = {http://icube-publis.unistra.fr/4-FPGJ18},
organization = {IEE},
abstract = {Smart Cities need real time information to improve the efficiency of their transportation systems. In particular, crowd sensing may help to identify the current speed in each street, the congested areas, etc. In this context, map matching techniques are required to map a sequence of GPS waypoints into a set of streets on a common map. Unfortunately, most map matching approaches are probabilistic. We propose rather an unambiguous algorithm, able to identify all the possible paths that match a given sequence of waypoints. We need an unambiguous identification for each waypoints set. For instance, the actual speed should be assigned to the correct set of streets, without error. To identify all the possible streets, we construct the set of candidates iteratively. We identify all the edge candidates around each waypoint, and reconstruct all the possible sub-routes that connect them. We then verify a set of constraints, to eliminate impossible routes. The road segments common to all computed routes form an unambiguous match. We evaluate the matching ratio of our technique on real city maps (London, Paris and Luxembourg). We also validate our approach with a real GPS trace in Seattle.},
bibsource = {dblp computer science bibliography, https://dblp.org},
biburl = {https://dblp.org/rec/conf/wimob/FalekPGJT18.bib},
eventdate = {15-17 Oct. 2018},
eventtitleaddon = {Limassol},
file = {:https\://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=8589103:PDF},
groups = {International Conferences},
keywords = {Global Positioning System, Roads, Sensors, Real-time systems, Urban areas, Probabilistic logic, Atmospheric measurements, Smart Cities, unambiguous map matching, crowd sensing, GPS traces, merging heterogeneous datasets},
type = {Selective conference},
x-international-audience = {Yes},
x-language = {EN}
}
Related publications
To Re-Route, or not to Re-Route: Impact of Real-Time Re-Routing in Urban Road Networks
Mohamed Amine Falek, Antoine Gallais, and Cristel Pelsser, et al.
Journal of Intelligent Transportation Systems: Technology, Planning, and Operations, 2021
De l’(in)inutilité du temps-réel pour le calcul d'itinéraire dans les réseaux routiers
Mohamed Amine Falek, Antoine Gallais, and Cristel Pelsser, et al.
AlgoTel, 2019
Measuring Performance Under Failures in the LHCb Data Acquisition Network
Eloise Stein, Flavio Pisani, and Tommaso Colombo, et al.
IEEE Transactions on Nuclear Science, 2024
MUSE: Multimodal Separators for Efficient Route Planning in Transportation Networks
Mohamed Amine Falek, Cristel Pelsser, and Sébastien Julien, et al.
Transportation Science, INFORMS, 2021