BGP Beacons, Network Tomography, and Bayesian Computation to Locate Route Flap Damping
Caitlin Gray , Clemens Mosig , Randy Bush , Cristel Pelsser , M. Roughan , Thomas Schmidt and Matthias Wählisch
This 2020 international conference paper, by Caitlin Gray and 6 coauthors, was presented at Internet Measurement Conference (IMC). Topics covered include hamiltonian monte carlo, metropolis-hasting, rfd, and rpki.
Full author list: Caitlin Gray, Clemens Mosig, Randy Bush, Cristel Pelsser, M. Roughan, Thomas Schmidt, and Matthias Wählisch.
Abstract
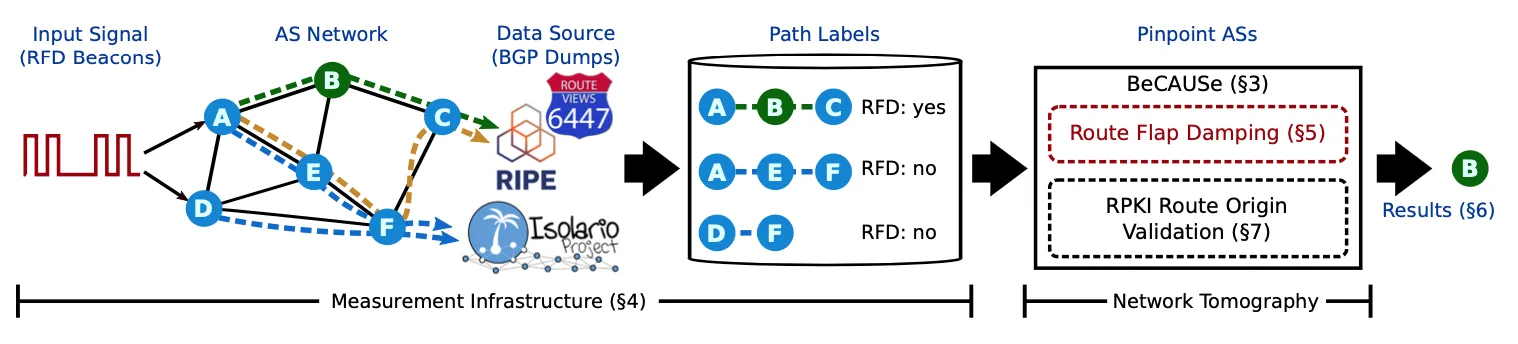
Pinpointing autonomous systems which deploy specific inter-domain techniques such as Route Flap Damping (RFD) or Route Origin Validation (ROV) remains a challenge today. Previous approaches to detect per-AS behavior often relied on heuristics derived from passive and active measurements. Those heuristics, however, often lacked accuracy or imposed tight restrictions on the measurement methods. We introduce an algorithmic framework for network tomography, BeCAUSe, which implements Bayesian Computation for Autonomous Systems. Using our original combination of active probing and stochastic simulation, we present the first study to expose the deployment of RFD. In contrast to the expectation of the Internet community, we find that at least 9% of measured ASs enable RFD, most using deprecated vendor default configuration parameters. To illustrate the power of computational Bayesian methods we compare BeCAUSe with three RFD heuristics. Thereafter we successfully apply a generalization of the Bayesian method to a second challenge, measuring deployment of ROV.
Publication Details
- Publication Type
- Conference Paper
- Publication Date
- January 2020
- Published In
- Internet Measurement Conference (IMC)
- Pages
- 492–505
- Publisher
- ACM
- Location
- Virtual Event, USA
- Digital Object Identifier (DOI)
- 10.1145/3419394.3423624
- External Link
- http://icube-publis.unistra.fr/4-GCBP20
Suggested citation
Caitlin Gray, Clemens Mosig, Randy Bush, Cristel Pelsser, M. Roughan, Thomas Schmidt, and Matthias Wählisch. 2020. BGP Beacons, Network Tomography, and Bayesian Computation to Locate Route Flap Damping. In Internet Measurement Conference (IMC). ACM, Virtual Event, USA, 492–505. https://doi.org/10.1145/3419394.3423624
BibTeX Citation
BibTeX Citation
@inproceedings{Gray2020a,
title = {BGP Beacons, Network Tomography, and Bayesian Computation to Locate Route Flap Damping},
author = {Gray, Caitlin and Mosig, Clemens and Bush, Randy and Pelsser, Cristel and Roughan, M. and Schmidt, Thomas and Wählisch, Matthias},
year = 2020,
month = jan,
booktitle = {Internet Measurement Conference (IMC)},
location = {Virtual Event, USA},
publisher = {ACM},
pages = {492--505},
doi = {10.1145/3419394.3423624},
url = {http://icube-publis.unistra.fr/4-GCBP20},
abstract = {Pinpointing autonomous systems which deploy specific inter-domain techniques such as Route Flap Damping (RFD) or Route Origin Validation (ROV) remains a challenge today. Previous approaches to detect per-AS behavior often relied on heuristics derived from passive and active measurements. Those heuristics, however, often lacked accuracy or imposed tight restrictions on the measurement methods. We introduce an algorithmic framework for network tomography, BeCAUSe, which implements Bayesian Computation for Autonomous Systems. Using our original combination of active probing and stochastic simulation, we present the first study to expose the deployment of RFD. In contrast to the expectation of the Internet community, we find that at least 9% of measured ASs enable RFD, most using deprecated vendor default configuration parameters. To illustrate the power of computational Bayesian methods we compare BeCAUSe with three RFD heuristics. Thereafter we successfully apply a generalization of the Bayesian method to a second challenge, measuring deployment of ROV.},
groups = {International Conferences},
keywords = {Hamiltonian Monte Carlo, Metropolis-Hasting, RFD, RPKI},
numpages = 14,
x-international-audience = {Yes},
x-language = {EN}
}
Related publications
Revisiting Recommended BGP Route Flap Damping Configurations
Clemens Mosig, Randy Bush, and Cristel Pelsser, et al.
Proc. of Network Traffic Measurement and Analysis Conference (TMA), 2021
Revisiting Route Flap Damping in the Wild
Mosig Clemens, Randy Bush, and Cristel Pelsser, et al.
Internet Measurement Conference (IMC), 2019
Enforcing RPKI-based routing policy on the data plane at an internet exchange
Josh Bailey, Dean Pemberton, and Andy Linton, et al.
Proceedings of the third workshop on Hot topics in software defined networking, HotSDN '14, 2014
Enforcing RPKI-Based Routing Policy on the Data Plane at an Internet Exchange
Josh Bailey, Dean Pemberton, and Andy Linton, et al.
HotSDN 2014 (Poster session), 2014